

Projekt auf einen Blick
Im Projekt geht es darum, bestehende smarte Strassenleuchten mit zusätzlicher Sensorik auszustatten. Der Sensor soll an der Zhaga-Schnittstelle montiert werden und die Fahrbahnen überwachen. Der implementierte Algorithmus soll Objekte detektieren und deren Geschwindigkeit sowie Länge bestimmen. Dies ermöglicht es, Strassenleuchten noch intelligenter zu dimmen und zu schalten. Zusätzlich wird eine intelligente Verkehrsüberwachung angestrebt, beispielsweise, um freie Parkflächen zu detektieren.
{kind=link}
Projekt
Smart Street Lighting with Object Detection and Analysis CapabilitiesLead
Institut für Photonics und Robotics (IPR) Mehr über Institut für Photonics und Robotics (IPR)Projektleitung
Leutenegger Tobias Mehr über Leutenegger TobiasBeteiligte
esave ag Mehr zu den BeteiligtenTeam
Roebrock Philipp Mehr über Roebrock Philipp Bitzer Andreas Mehr über Bitzer Andreas Catregn Gion-Pol Mehr über Catregn Gion-Pol Frey Noel Mehr über Frey Noel Seeli Mirco Mehr über Seeli MircoForschungsfelder
Bildverarbeitung Mehr über Bildverarbeitung Optoelektronik Mehr über OptoelektronikAuftrag/Finanzierung
InnosuisseDauer
Februar 2023 - Juli 2025
Ausgangslage
Aktuell sind viele Strassenlampen bereits auf LED umgestellt. Diese Strassenlampen sind oft über ein Funknetz miteinander verbunden und besitzen einen Beleuchtungscontroller, über welchen das Leuchtmittel gedimmt und geschaltet werden kann. Einige der Strassenleuchten sind mit Passiv-Infrarot (PIR)-Sensoren ausgestattet, welche Objekte unter der Lampe detektieren können. Durch das dichte Netz und die Höhe (9–12 m) sind Strassenleuchten für die Integration weiterer Sensorik prädestiniert.
Projektziel
Ziel dieses Projektes ist es, eine Strassenleuchte mit weiterer Sensorik auszustatten. Dabei gilt es zunächst herauszufinden, welche Technologie für eine Objektdetektion und -klassifizierung geeignet ist. In Frage kommen Time-Of-Flight, LIDAR, RADAR oder reguläre 2D-Kameras. Ist die richtige Technologie oder eine Kombination davon bestimmt, soll in einem nächsten Schritt ein Prototyp einer Sensoreinheit für die Montage an der Strassenleuchte entwickelt werden. Der Sensor wird über eine standardisierte Zhaga-Schnittstelle an der Strassenleuchte montiert. Da diese Schnittstelle nur beschränkte Leistung zur Verfügung stellt, muss der Sensor eine Leistungsaufnahme von weniger als 2 Watt erreichen.
Umsetzung
In einem erweiterten Testaufbau sollen vorerst die verschiedenen Technologien evaluiert werden. Dabei sollen auch Umwelteinflüsse wie Sonnenschein, Nebel, Regen oder Schnee mitberücksichtigt werden. Neben der Performance ist es auch wichtig, eine kostenoptimierte Lösung zu finden, welche nicht mehr als 2 Watt Leistung bezieht. Die Entwicklung des Prototyps umfasst Sensorik, Beleuchtung, Elektronik, Gehäuse sowie eine Embedded Plattform.
Resultate
Ein Prototyp wurde erfolgreich entwickelt und bei verschiedenen Bedingungen (Sonne, Regen, Nacht) getestet. Während der Testmessungen wurden die geforderten 85 Prozent Erkennungsgenauigkeit grösstenteils erreicht.
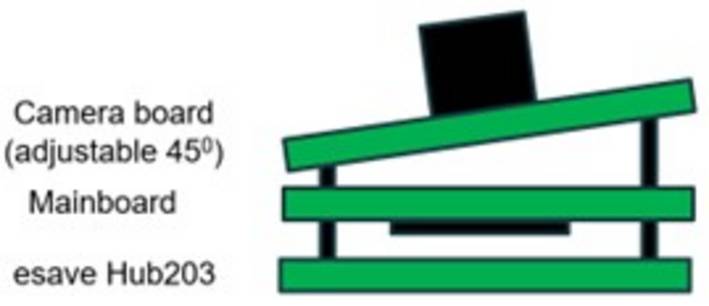
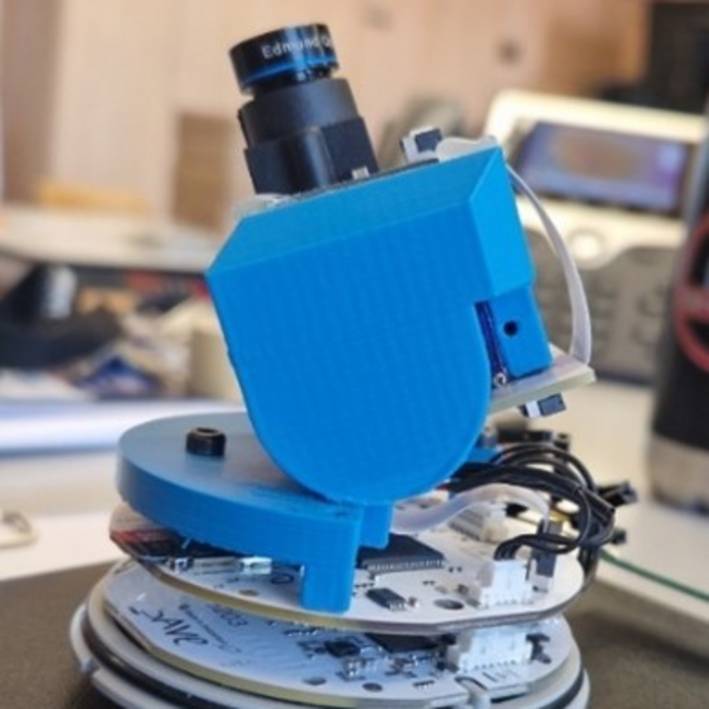
Der Sensor besteht aus einem PCB-Stack (Abb. 1 links) mit einem Kameraboard, dem Mainboard und dem bestehenden Board der Firma esave. Die Kamera kann per Servoansteuerung (Abb. 1 Mitte) verstellt werden und wird an der Zhaga-Schnittstelle an der Strassenlampe montiert (Abb. 1 rechts).

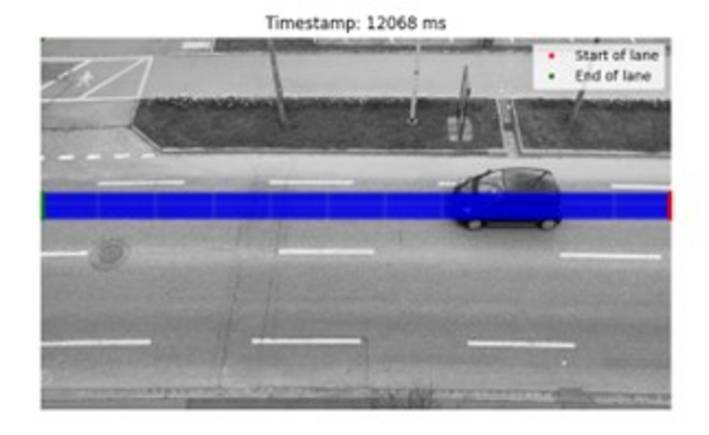
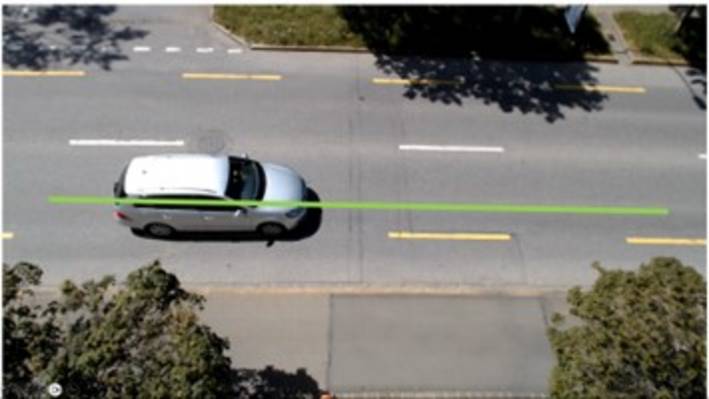
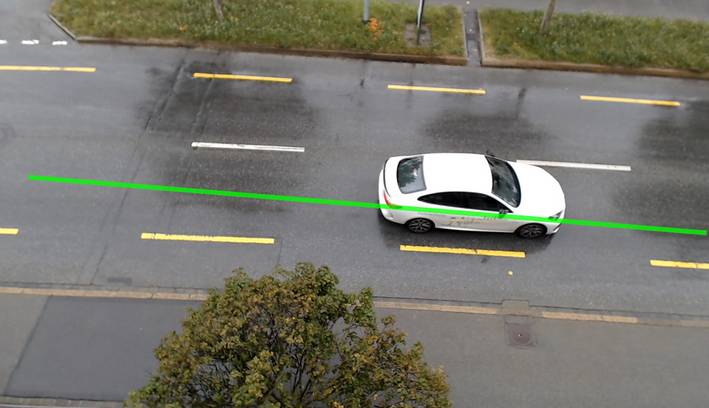
Im ersten Schritt wird auf dem Kamerabild eine Linie markiert, entlang welcher der Sensor die Fahrzeuge erkennen soll (Abb. 2). Für jedes Objekt werden die Länge und die Geschwindigkeit ermittelt und übertragen.
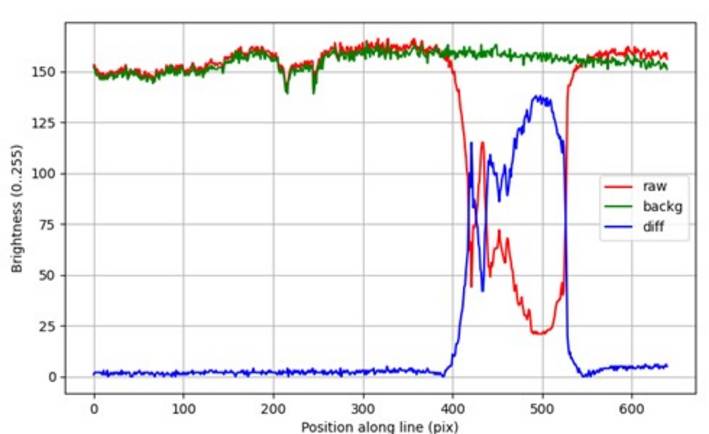
Aufgrund der Leistungs-Einschränkungen kann nur ein Mikrocontroller mit begrenzten Fähigkeiten verwendet werden. Daher wurde ein intelligenter Algorithmus entwickelt, welcher unter anderem die Hintergrundsituation mitberücksichtig. Dazu wird das Hintergrundsignal (Abb. 3 grün) von dem Messsignal (Abb. 3 rot) subtrahiert und das resultierende Differenzsignal (Abb.3 blau) weiter prozessiert.
Der Prototyp wurde im Sonnenlicht (Abb. 4), Regen (Abb. 5) und in der Nacht (Abb. 6) an einer Strasse getestet.

Team






Weiterführende Information
Beteiligte