

Ein herrlicher Herbsttag im schönen Graubünden – der Himmel stahlblau, die Luft klar, aber schon etwas kühl, und das Ziel in Reichweite. Mit den Kolleginnen und Kollegen brechen wir auf zur nächsten Etappe. Wir fühlen uns fit und kommen gut voran. Der Schwierigkeitsgrad ist fordernd, aber wir sind ja auch keine Anfängerinnen und Anfänger mehr. Für einen kurzen Moment sind wir nicht konzentriert und alles geht sehr schnell: Ein Tritt ins Leere, der freie Fall, alles dreht sich und die potenzielle Energie wird in kinetische Energie umgewandelt. Wir warten auf den Aufprall und denken: War‘s das?
Text: Tobias Leutenegger / Bilder, Video: Lorena Sonder, FH Graubünden
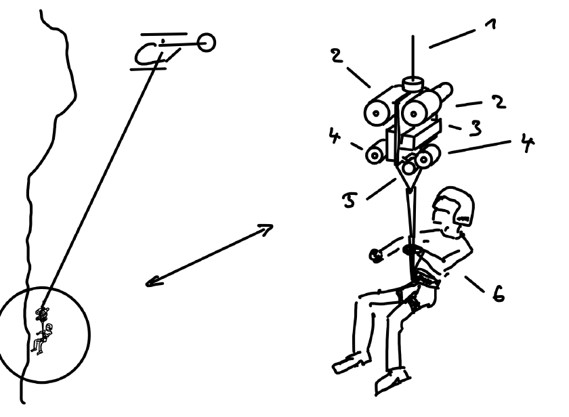
Die Szene beschreibt nicht den Studierendenalltag an der Fachhochschule Graubünden, sondern einen Absturz auf einer Bergtour. Die Bergung verletzter Alpinistinnen und Alpinisten aus Felswänden ist eine herausfordernde Aufgabe. Oft wird sie per Seilrettung mit dem Helikopter durchgeführt; um den Retter an die Felswand zu bringen, muss der Pilot heikle Pendelbewegungen mit dem Helikopter ausführen. Das Institut für Photonics und Robotics der Fachhochschule Graubünden entwickelt deshalb im Rahmen eines Forschungsprojekts mit Alpine Rettung Schweiz (ARS) ein Rettungsassistenzsystem für solche gefährlichen Longline-Einsätze.
Szenenwechsel
«Studiere Photonics an der Fachhochschule Graubünden – ein praxisorientiertes Studium in einem aufstrebenden Gebiet mit vielen coolen Projekten.» Diesem Versprechen des Studienleiters Tobias Leutenegger folgten im Herbst 2019 auch jene Photonics-Studierenden, welche sich nun im 5. Semester befinden. Ein Einblick in das laufende Studierendenprojekt «Alpine Drone Rescue» soll zeigen, ob das Studium hält, was es verspricht.
In den höheren Semestern soll das Gelernte aus verschiedenen Fächern in einem realen Projekt zusammengefügt werden. Die Komplexität des oben beschriebenen Forschungsprojekts wird zu diesem Zweck etwas vereinfacht und die Aufgabe der Studierenden besteht nun darin, ein Prototypensystem in verkleinertem Massstab zu entwickeln, um in einem autonomen Flugbetrieb eine kleine Playmobilfigur zu retten.
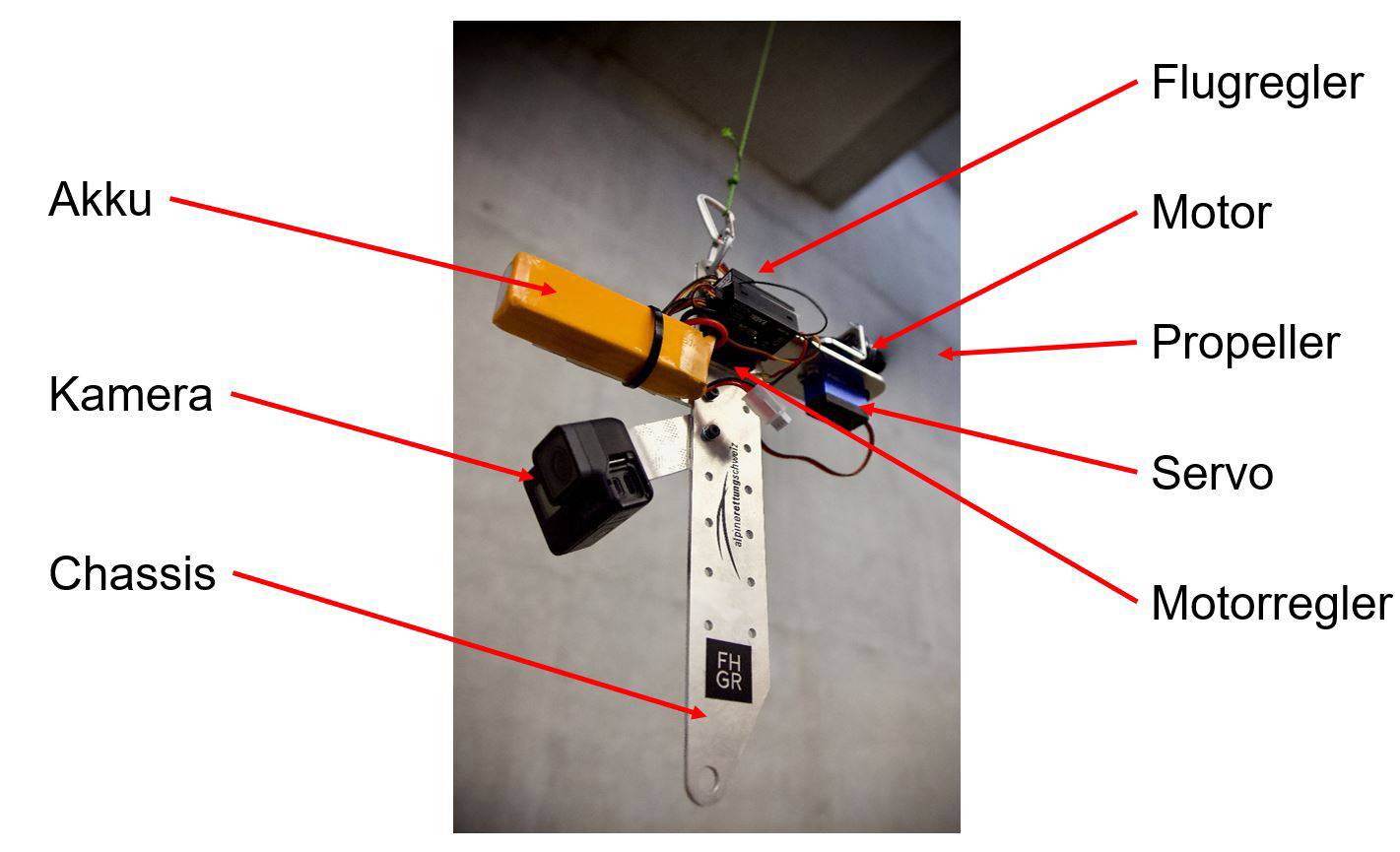
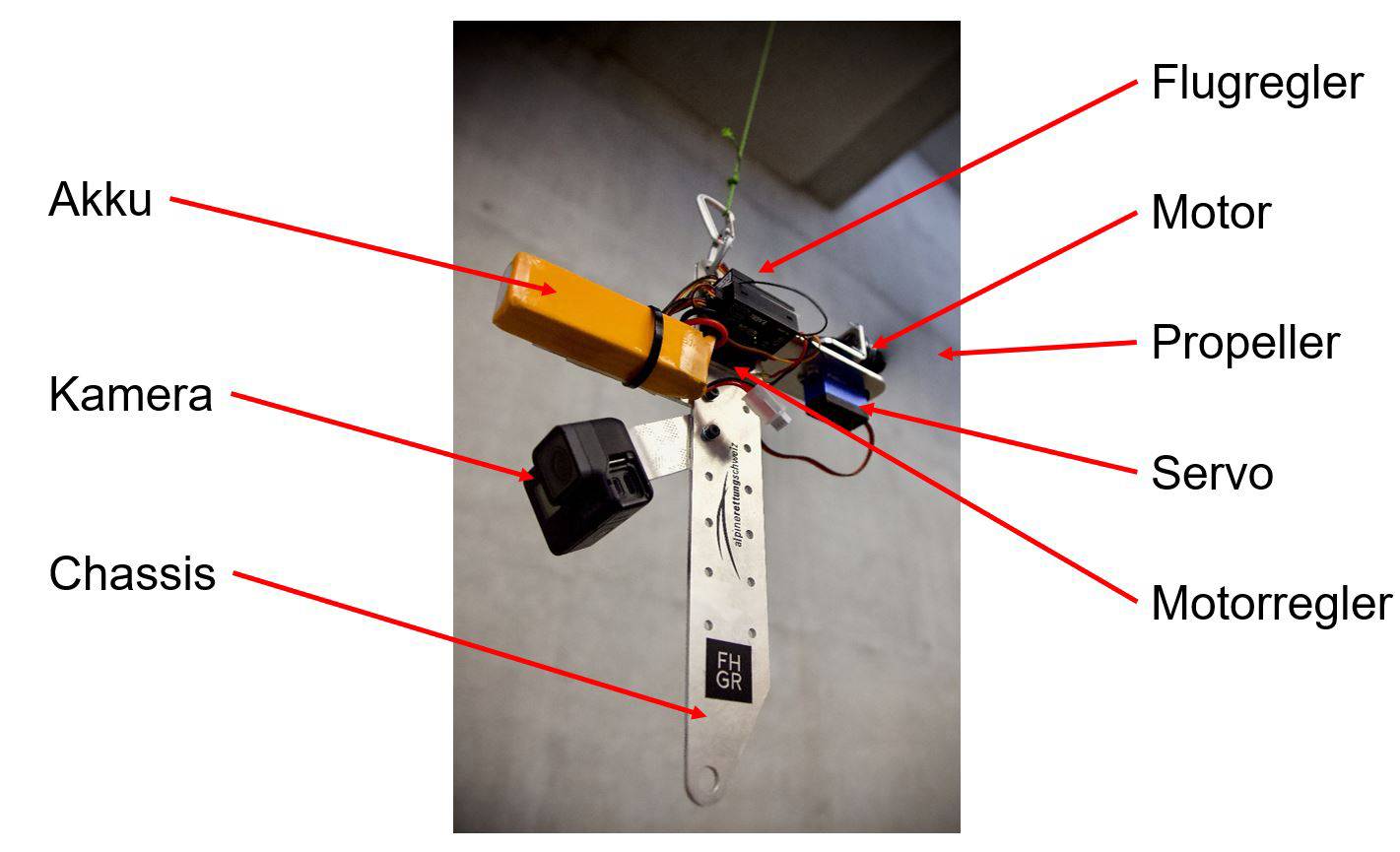
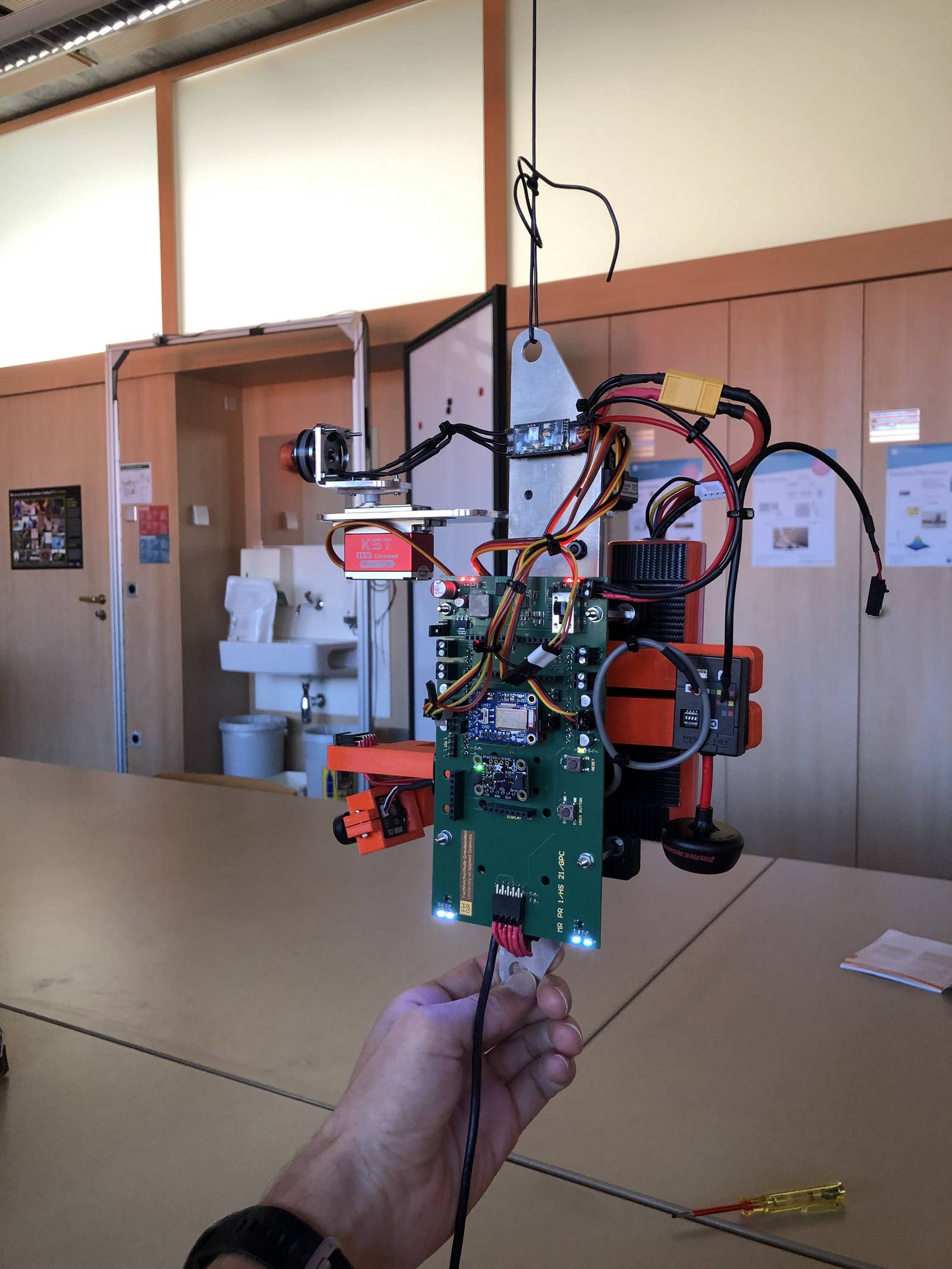
Die Studierenden arbeiteten bei diesem Projekt in Dreier- oder Viererteams und erhielten jeweils einen Satz Hardware (Bild 2). Dieser beinhaltete Motor, Propeller und Motorregler für den Antrieb, Servomotor und Flugregler für die Stabilisierung der Position, Akku und Chassis sowie eine Kamera und einen Distanzsensor (nicht abgebildet).
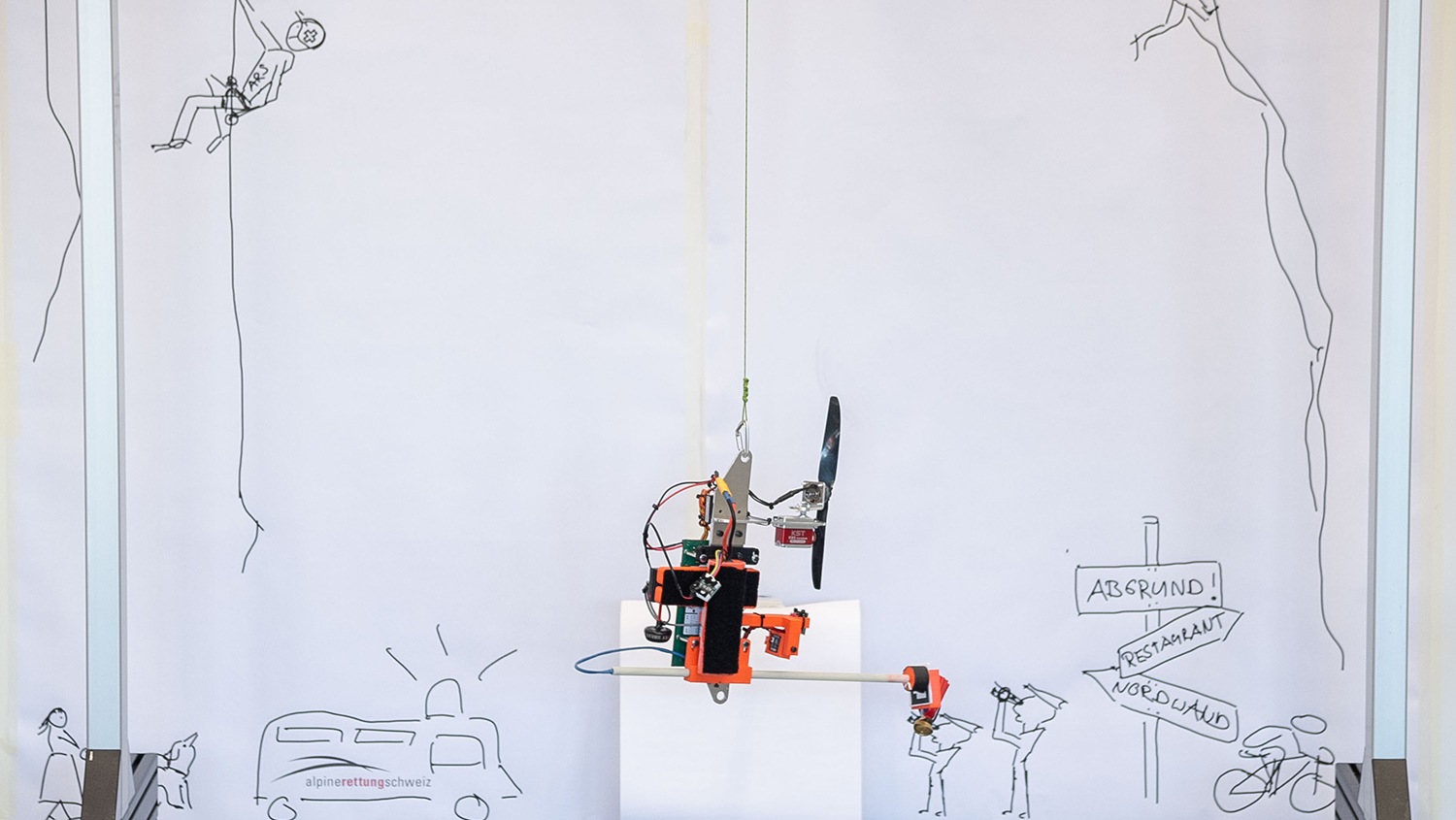
Die Aufgabe bestand darin, dass der Prototyp an einer Leine aufgehängt wird und dann autonom, das heisst nach Betätigung eines Startknopfs, die Playmobilfigur findet, sich dieser nähert und sie rettet. Damit die verschiedenen Hardwarekomponenten miteinander als System funktionieren, müssen im ersten Schritt Softwaretreiber geschrieben werden. So können dann zum Beispiel die Motorleistung angepasst oder die Daten der Beschleunigungssensoren ausgelesen werden.
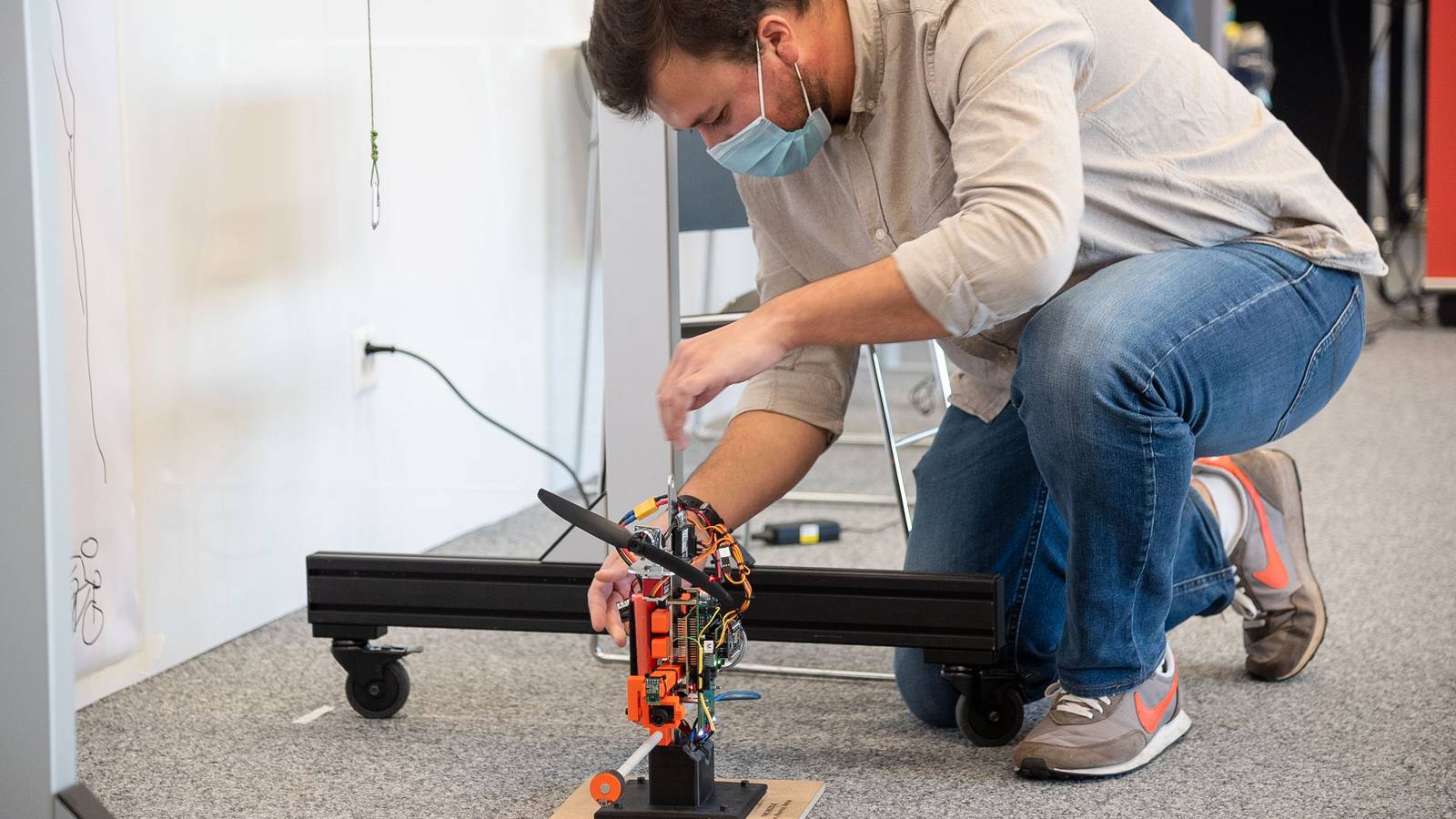
An einem ersten Meilenstein-Meeting mussten die Studierenden den Dozierenden demonstrieren, dass alle Hardwarekomponenten angesteuert werden können und das System sicher betrieben werden kann. Dabei wurde der Prototyp in einen Schraubstock eingespannt; erst nach erteilter Freigabe durften die ersten Versuche am Seil durchgeführt werden. Zudem mussten auch Sicherheitsfunktionen eingebaut worden sein – das System musste beispielsweise bei der Überschreitung einer kritischen Beschleunigung (unkontrolliertes Flugverhalten) automatisch den Motor ausschalten.
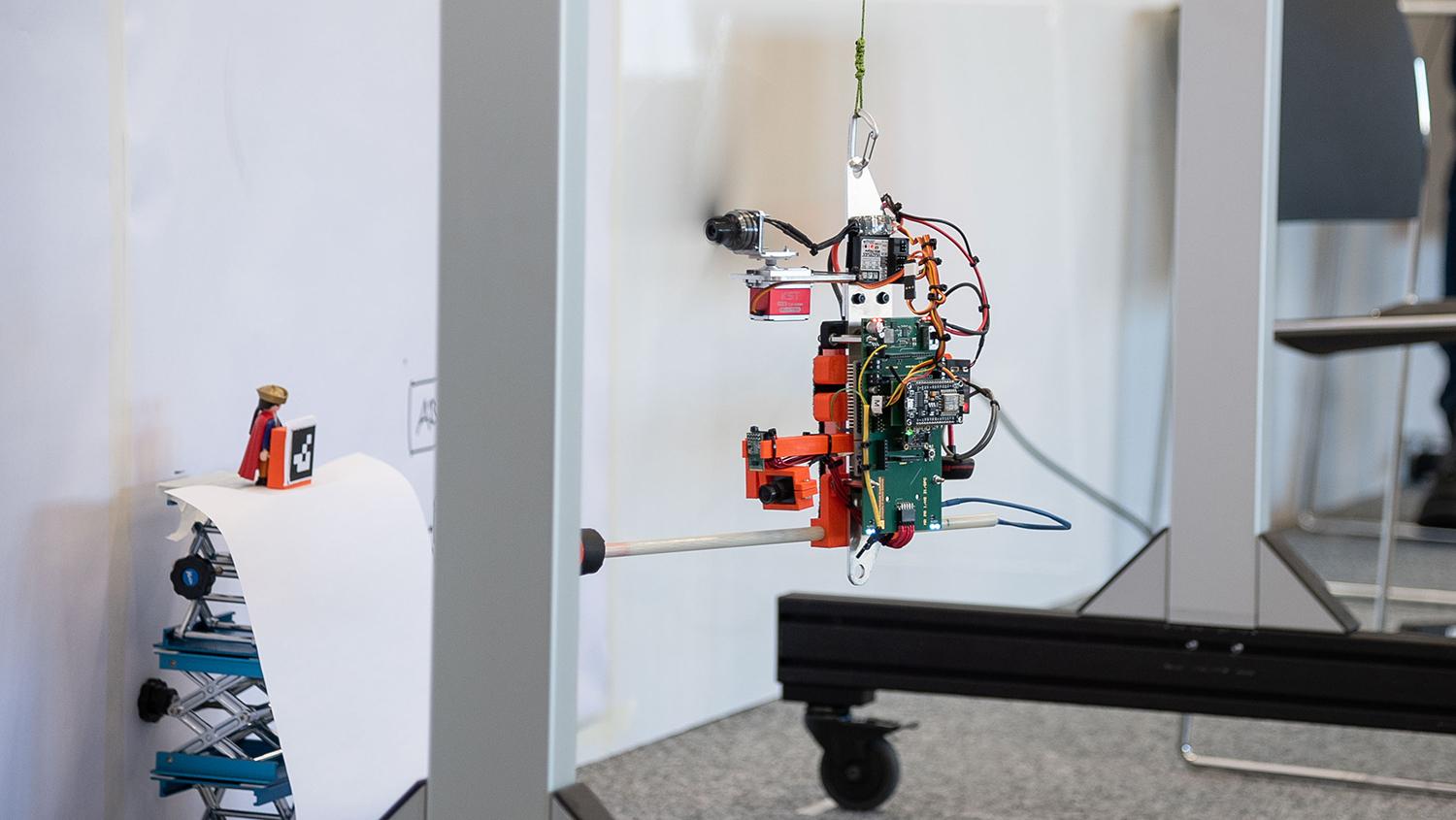
Für die eingebundene Kamera, welche die Bilder per WiFi überträgt, musste ein Bildverarbeitungsalgorithmus geschrieben werden, welcher die Playmobilfigur erkennt. Das Grundlagenwissen hierfür hatten die Studierenden in den Bildverarbeitungsmodulen erlernt – sie mussten es nun auf die reale Projektsituation anwenden. Dabei zeigte sich, dass sich das viel einfacher anhört, als es dann wirklich ist.
Wurde die Position der Figur erkannt, musste ein ausgeklügeltes Regelungssystem den Prototypen autonom zur Figur leiten. Der Abstand wurde mit einem Time-of-Flight-Sensor gemessen. Vor dem Kontakt mit der Figur musste das System rechtzeitig abgebremst werden – denn die Vorgabe der Studienleitung war, dass die Playmobilfigur an einer Tischkante stehen musste und nicht hinunterfallen durfte.
Die Aufgabe bestand darin, dass der Prototyp an einer Leine aufgehängt wird und dann autonom, das heisst nach Betätigung eines Startknopfs, die Playmobilfigur findet, sich dieser nähert und sie rettet. Damit die verschiedenen Hardwarekomponenten miteinander als System funktionieren, müssen im ersten Schritt Softwaretreiber geschrieben werden. So können dann zum Beispiel die Motorleistung angepasst oder die Daten der Beschleunigungssensoren ausgelesen werden.
An einem ersten Meilenstein-Meeting mussten die Studierenden den Dozierenden demonstrieren, dass alle Hardwarekomponenten angesteuert werden können und das System sicher betrieben werden kann. Dabei wurde der Prototyp in einen Schraubstock eingespannt; erst nach erteilter Freigabe durften die ersten Versuche am Seil durchgeführt werden. Zudem mussten auch Sicherheitsfunktionen eingebaut worden sein – das System musste beispielsweise bei der Überschreitung einer kritischen Beschleunigung (unkontrolliertes Flugverhalten) automatisch den Motor ausschalten.
Für die eingebundene Kamera, welche die Bilder per WiFi überträgt, musste ein Bildverarbeitungsalgorithmus geschrieben werden, welcher die Playmobilfigur erkennt. Das Grundlagenwissen hierfür hatten die Studierenden in den Bildverarbeitungsmodulen erlernt – sie mussten es nun auf die reale Projektsituation anwenden. Dabei zeigte sich, dass sich das viel einfacher anhört, als es dann wirklich ist.
Wurde die Position der Figur erkannt, musste ein ausgeklügeltes Regelungssystem den Prototypen autonom zur Figur leiten. Der Abstand wurde mit einem Time-of-Flight-Sensor gemessen. Vor dem Kontakt mit der Figur musste das System rechtzeitig abgebremst werden – denn die Vorgabe der Studienleitung war, dass die Playmobilfigur an einer Tischkante stehen musste und nicht hinunterfallen durfte.
Wichtige Teilaspekte des Projekts waren auch die konzeptionellen Überlegungen zu Projektbeginn sowie das Projektmanagement. Dabei wurde den Teams viel Freiheit eingeräumt. Sollte die gesamte Software in Python auf dem Laptop laufen, was einfacher, aber langsamer ist, oder sollten die zeitkritischen Auswertungen als «Embedded»-Software direkt auf dem mitfliegenden Mikrocontroller durchgeführt werden? Viele schwierige Fragen für die Studierenden, bei welchen die Dozierenden natürlich jeweils als Coaches zur Verfügung standen.
Stresstest bei der Live-Demo
Mitte Semester folgte dann der nächste Meilenstein des Projekts: Die drei Teams mussten den Dozierenden ihren Zwischenstand präsentieren und in einer Live-Demo aufzeigen, wie weit sie mit ihren Arbeiten gekommen waren. Das Siegerteam «durfte» dann sein System am Infotag vor Ort den Studieninteressentinnen und -interessenten live vorstellen.
Im Januar 2022, am Schluss des Semesters, kam es schliesslich zum grossen Showdown: Die Studierenden durften an einem gemeinsamen Anlass mit dem Projektpartner, der Alpinen Rettung Schweiz (ARS), die von ihnen entwickelten Systeme präsentieren. Auf diese Weise konnten die Studierenden und das Forschungsprojekt wieder zusammengeführt werden. Die Erkenntnisse der Studierenden fliessen nun in das Forschungsprojekt ein, womit sie einen wichtigen Beitrag daran leisten konnten.
Nun – hält das Studium, was es verspricht? Aus Sicht der Studienleitung kann diese Frage klar mit «Ja» beantwortet werden. Reale Forschungsprojekte werden so aufbereitet, dass die Studierenden die erlernten Grundlagen in komplexen Gesamtsystemen zusammenführen müssen und so die praktische Anwendung dieser Grundlagen erlernen. Aus Sicht der Studierenden wird diese Frage wahrscheinlich mit «Ja, aber …» beantwortet, denn bei der echten Umsetzung ist alles um einiges schwieriger, als es zunächst getönt hatte – dafür aber umso spannender.
Und genau deshalb wollen diese jungen Menschen ja auch Ingenieurinnen und Ingenieure werden!



{kind=link}
Beitrag von
Prof. Dr. Tobias Leutenegger, Leiter Institut für Photonics und Robotics