Projekt auf einen Blick
In diesem Projekt wurden – in Zusammenarbeit mit der Alpinen Rettung Schweiz (ARS) – innovative Ansätze aus den Bereichen Robotik, Sensorik, Regelungstechnik, Datenübertragung und Bilderkennung kombiniert, um den Stand der Technik in der alpinen Luftrettung zu erweitern. Dazu wurde ein Prototyp für ein Longline-Rettungsassistenzsystem entwickelt und es wurden erste Erfahrungen und Erkenntnisse diesbezüglich gesammelt.
{kind=link}
Projekt
Rettungs-Assistenzsysteme für die alpine RettungLead
Institut für Photonics und Robotics (IPR) Mehr über Institut für Photonics und Robotics (IPR)Projektleitung
Bitzer Andreas Mehr über Bitzer AndreasBeteiligte
Prolab, Photonics Lab, Mobile Robotics LabTeam
Schlegel Manuel Mehr über Schlegel ManuelForschungsfelder
Angewandte Robotik Mehr über Angewandte RobotikAuftrag/Finanzierung
Förderverein der FH GraubündenDauer
Februar 2021 bis Dezember 2022
Ausgangslage
Alpine Freizeitbeschäftigungen wie E-Biken, Wandern, Skitourengehen, Klettern, Gleitschirmfliegen und vieles mehr boomen und locken immer mehr Besucher in alpines Gelände. Dies hat auch zur Folge, dass Gebirgs-Rettungseinsätze mit dem Helikopter immer häufiger durchgeführt werden müssen. In schwer zugänglichem Gelände wird der Retter meistens mittels einer Seilwinde vom Helikopter zum Verunfallten abgelassen. Je nach Gelände und Exposition können derartige Einsätze durch alpine Gefahren wie Steinschlag, Lawinen oder gefährliche Windverhältnissen beeinträchtigt werden. Ein Risikofaktor geht dabei auch vom Rotorwind des Helikopters aus (Downwash), der Auslöser von Steinschlag oder Lawinen sein kann.
Projektziel
Um derartige Risiken zu minimieren, wurde für die Longline Technik, welche bei Helikoptereinsätzen in schwer zugänglichem Gelände eingesetzt wird, an der FH Graubünden zusammen mit der Alpinen Rettung Schweiz (ARS) ein Prototyp für einen navigierbaren Seilwindenhaken entwickelt, welcher ferngesteuert von einem Operator gelenkt wird. Dadurch wird erreicht, dass bei Longline Einsätzen die Abstimmung zwischen Pilotin oder Pilot und Rettungskraft weniger komplex wird. Der Pilot kann sich auf das Halten einer fixen Flugposition konzentrieren und die Rettungskraft wird mit Hilfe von Kamerasystemen ferngesteuert zu einem Einsatzort manövriert. So hat die Rettungskraft beide Hände frei für den Einsatz am Seil. Des Weiteren ermöglicht das System, dass der Helikopter einen grösseren Sicherheitsabstand zu Hindernissen wie Felswänden einnehmen kann, was alpinen Gefahren wie Steinschlag, Lawinen oder Turbulenzen, welche durch den Helikopter ausgelöst werden können, reduziert.
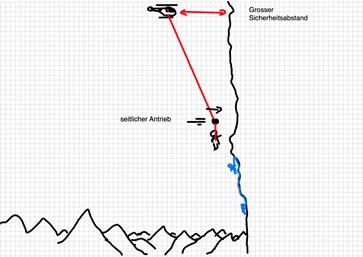
Das Rettungs-Assistenzsystem dient dazu die Retter seitlich zu manövrieren. Die dafür notwendigen Antriebe haben keine tragende Funktion, sondern dienen lediglich zur seitlichen Abstossung. Die vertikale Last der Rettungskraft wird über das Windenseil vom Helikopter getragen.
Um das Projektziel zu erreichen, wurden ein zweistufige Herangehensweise gewählt: Zunächst wurden im Rahmen eines Studierendenprojektes miniaturisierte Propeller-getriebene Prototypen entwickelt. Anschliessend wurde die Systeme hochskaliert und der Propeller- durch einen Turbinenantrieb ersetzt, um die benötigte Schubkraft zu erreichten.
Resultate
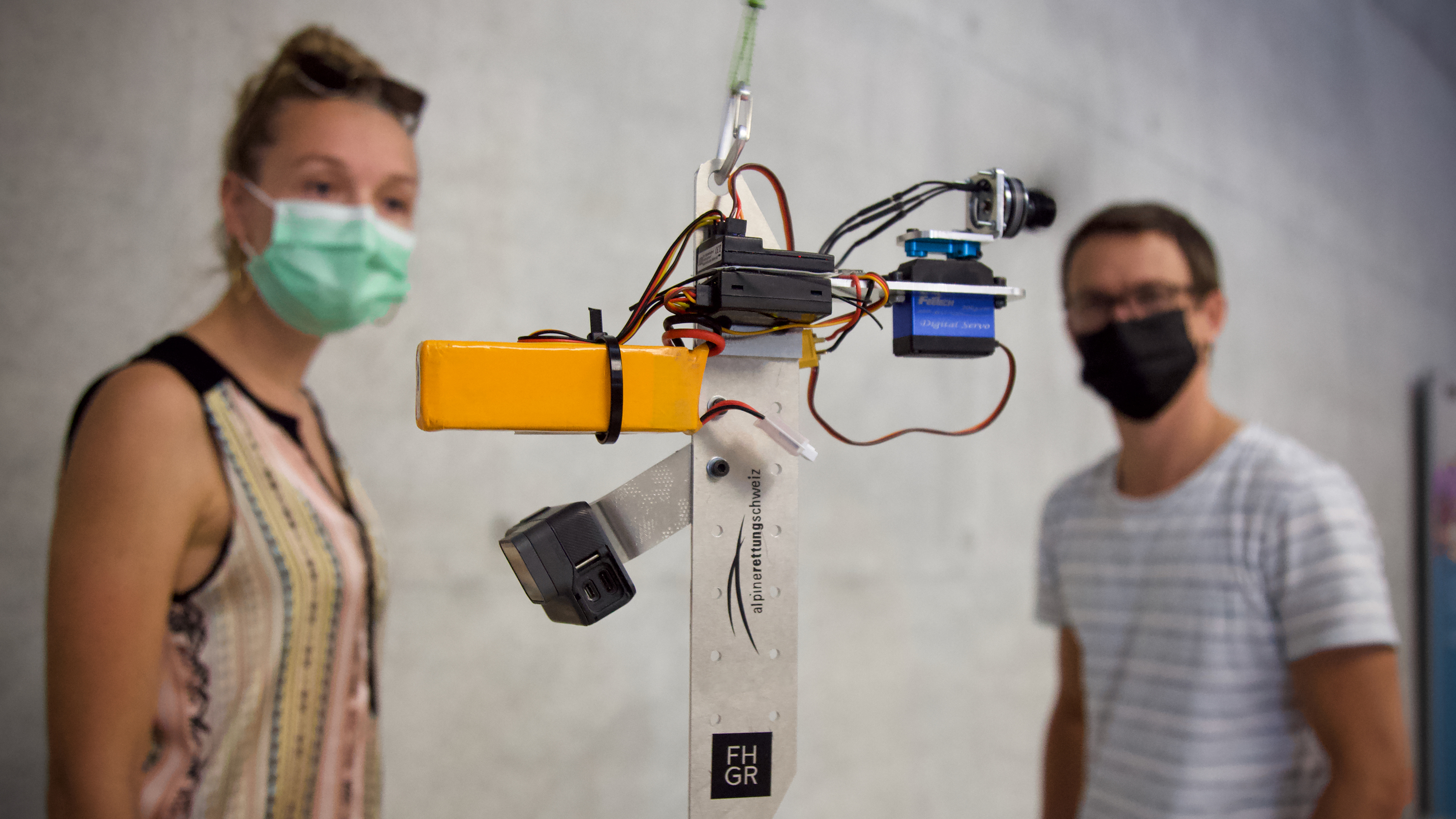
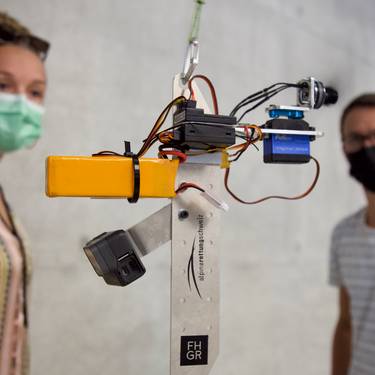
Miniaturisierter Prototyp
Im Rahmen dieses Studierendenprojekts entwickelten drei Teams jeweils einen miniaturisierten, propellergetriebenen Prototyp. Die Systeme hatten zwar nur begrenzte Schubkraft, doch sie waren bereits mit Lage- und Positionssensoren sowie mit Kameras und einer speziellen Bilderkennungssoftware ausgestattet. Zusätzlich entwickelten die Studierenden auch einen speziellen Regelalgorithmus, der die Lage des Systems analysiert und durch Steuerimpulse stabilisiert. Dieser Algorithmus ermöglicht es, Störeinwirkungen wie den Rotorwind oder Bewegungen des Retters auszugleichen, welche bei einem ungeregelten System am langen Seil ansonsten zu einem wilden Aufschaukeln führen könnten. Zum Abschluss demonstrierten die Studierenden im Rahmen einer Präsentation vor den Medien, wie sie mit ihrem System eine Spielzeugfigur aus einem Wandregal retten.
{kind=link}
Hochskalierter Prototyp
Im hochskalierten Prototyp wurden die Propellerantriebe durch neuartige Mini-Turbinen ersetzt. Diese sind sehr kompakt und ermöglichen Schubkräfte bis zu 100 kg.
Bei einer Demonstration an der Sunnibergbrücke konnte die Leistungsfähigkeit des hochskalierten Systems unter Beweis gestellt und eine Nutzlast von 60 kg stabil ausgelenkt werden.
{kind=link}
Team
Es haben folgende Personen am Projekt mitgearbeitet:
- Dozierende und Studierende der FH Graubünden (Photonics/ Mobile Robotics)
- Alpine Rettung Schweiz (ARS)


Weiterführende Information
Beteiligte
Publikationen
- «Bergrettung: Forscher tüfteln an neuem Rettungssystem», SRF Audio, 25.1.2022
- «Studierende türfteln am Rettungssystem der Zukunft», Engadiner Post, 13.1.2022
- «The Rezzle holt sich den ersten Platz», Südostschweiz, 12.1.2022
- «Ein Roboter für die alpine Rettung», Südostschweiz, 12.1.2022
- «Fachhochschule Graubünden entwickelt Prototyp für Rettung von Menschen», TV SO Rondo Magazin, 12.1.2022
- «Düsenantriebe für die Bergrettung», SRF Audio, 11.1.2022
- «Anspruchsvolle Rettungseinsätze im Gebirge», myScience, 11.1.2022