Projekt auf einen Blick
Durch die Verwendung von Leuchtdioden im sichtbaren Bereich wurden 3D-Time-of-Flight-Kameras für den Einsatz in Unterwasserumgebungen optimiert. Dies ermöglicht es, Bewegungsabläufe mit Gegenstandsweiten im Meterbereich zeitlich und in drei räumlichen Dimensionen aufzulösen.
Projekt
Time-of-Flight Kameras für UnterwasserapplikationenLead
Institut für Photonics und Robotics (IPR) Mehr über Institut für Photonics und Robotics (IPR)Projektleitung
Catregn Gion-Pol Mehr über Catregn Gion-PolBeteiligte
Swissrehamed Mehr zu den BeteiligtenTeam
Leutenegger Tobias Mehr über Leutenegger Tobias Merbold Hannes Mehr über Merbold HannesForschungsfelder
Optoelektronik Mehr über OptoelektronikAuftrag/Finanzierung
Stiftung TechnikDauer
Januar 2017 – Juni 2018
Ausgangslage
Time-of-Flight-Kameras (kurz: TOF-Kameras) sind 3D-Kamerasysteme mit denen, neben zweidimensionalen Bildern, als dritte Dimension auch die Distanz eines Objekts zur Kamera aufgenommen werden kann. Die TOF-Kamera emittiert Lichtpulse, die an einem Objekt reflektiert und auf einem zweidimensionalen Bildsensor abgebildet werden. Sie misst dann für jeden Pixel die Intensität und die Zeitdifferenz zwischen dem emittierten und dem reflektierten Lichtpuls. Da sich Licht mit einer endlichen Geschwindigkeit bewegt, kann aus der Laufzeit die Objektdistanz bestimmt werden. In den letzten Jahren wurden TOF-Kameras für eine immer grössere Anzahl Applikationen eingesetzt, beispielsweise zur Gestenerkennung oder als Sicherheitssensoren für autonome Fahrzeuge.
Projektziel
Ziel des Projekts ist es, die TOF-Kameratechnologie für den Unterwassereinsatz zu optimieren. Dabei stehen Anwendungen in Umgebungen mit geringen Schwebstoffkonzentrationen im Vordergrund, beispielsweise die zeitliche und räumliche Auflösung der Bewegungsabläufe von Rehabilitationspatientinnen und -patienten auf Unterwasser-Fahrradergometern in Schwimmbädern. Dies ist nicht trivial, da gegenwärtige TOF-Kameras Nahinfrarot-Leuchtdioden verwenden - mit einem Frequenzbereich, in dem Wasser eine sehr starke Absorption aufweist. Beispielsweise hat Wasser bei 850 nm bereits nach einer Propagationsdistanz von nur 1 Meter 99 % der ursprünglichen Intensität absorbiert.
Umsetzung
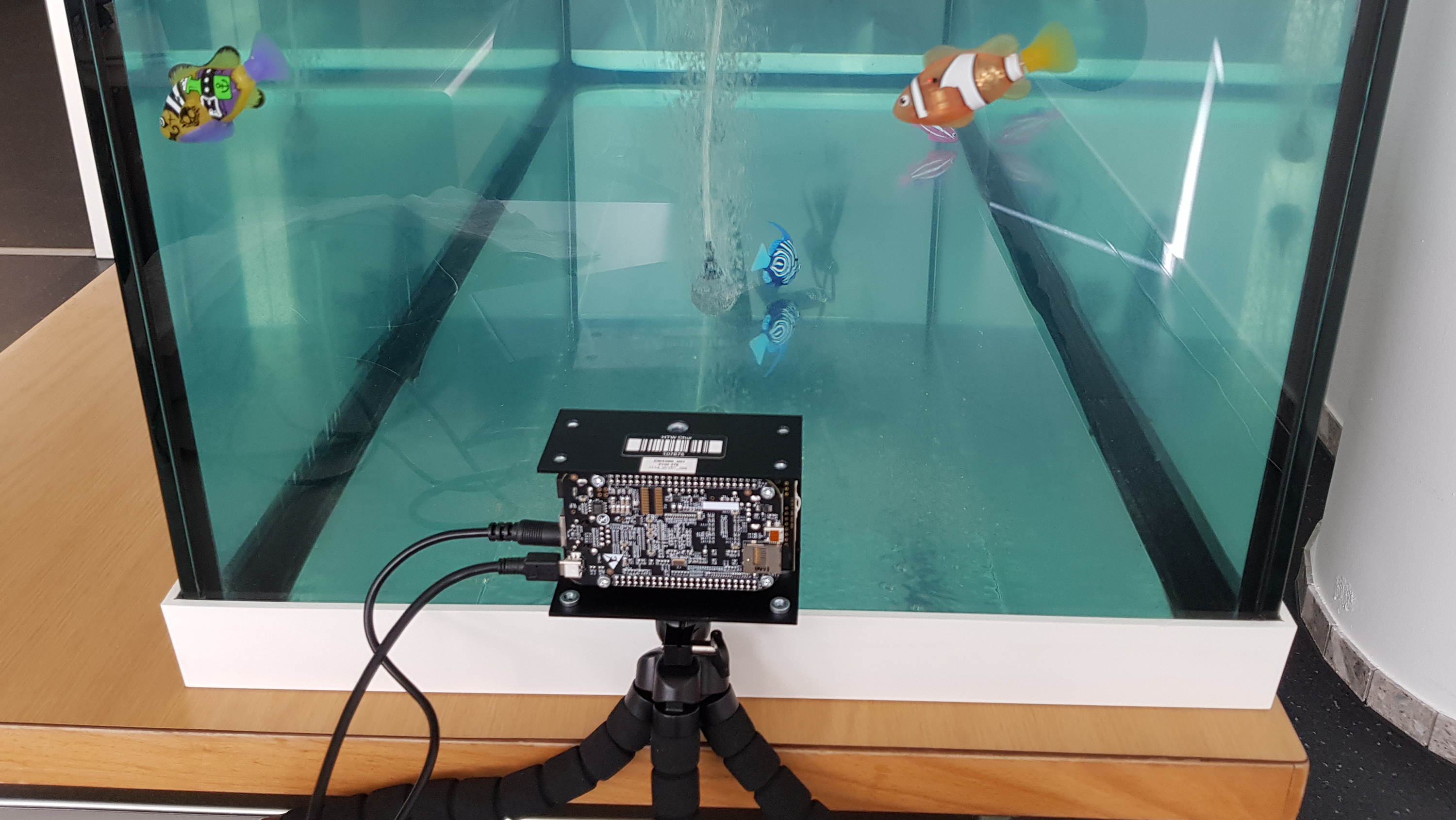
Der experimentelle Ansatz beruht auf einer TOF-Evaluationskamera der Herstellerin Espros Photonics Corporation aus Sargans. Die Kamera verfügt über eine separate Beleuchtungsleiterplatte, auf der acht Nahinfrarot-Leuchtdioden angebracht sind. Um die ideale Beleuchtungswellenlänge zu finden, wurden sieben weitere Leiterplatten hergestellt, die mit Leuchtdioden im sichtbaren Bereich -von Tiefblau bis Rot - bevölkert wurden. Die modifizierte Kamera wurde auf der Aussenseite eines 1,5 m langen Aquariums angebracht, so dass ihr Aufnahmefeld ins Innere des Aquariums ausgerichtet war. Als Abbildungsobjekt dienten wahlweise elektromechanische Spielzeugfische oder ein Aluminiumkörper, dessen Abstand zur Kamera modifiziert werden konnte. Für einen Bereich bekannter Gegenstandsweiten wurden TOF-Bilder aufgenommen, aus denen die Amplitude und die berechnete Distanz ausgelesen werden konnten. Dieses Vorgehen wurde für die verschiedenen Beleuchtungswellenlängen wiederholt und die Performanz wurde verglichen.

Resultate
Aus der in der Literatur dokumentierten Absorption von Wasser ist ersichtlich, dass die Transmission im sichtbaren Bereich umso grösser wird, je kleiner die Wellenlänge ist. In unserer experimentellen Studie wurden die höchsten Amplituden allerdings nicht für blaues, sondern für rotes Licht erzielt. Dies lässt sich dadurch erklären, dass die Absorption nur einer von mehreren performanzbestimmenden Effekten ist. Es gilt, zusätzlich noch die optische Leistung der emittierten Lichtpulse und die spektrale Empfindlichkeit des TOF-Bildsensors zu berücksichtigen. Beide sind für rote Leuchtdioden am grössten. Ein Vergleich der tatsächlichen und der von der TOF-Kamera berechneten Gegenstandsweiten führte ausserdem zur Schlussfolgerung, dass für Unterwasserapplikationen auch die Ansprechzeiten der Leuchtdioden und die durch den Brechungsindex gegebene Propagationsgeschwindigkeit der Lichtpulse im Wasser berücksichtigt werden müssen.
Team



Weiterführende Information
Publikationen
- Merbold H., Catregn G.-P., Leutenegger T., «Time-of-flight range imaging for underwater applications», SPIE Digital Library, Proceedings Volume 10539, Photonic Instrumentation Engineering V, 1053903 (2018), doi: 10.1117/12.2283476
- Merbold H., Catregn G.-P., Leutenegger T., «Time-of-flight range imaging for underwater applications», SPIE Photonics West 2018, San Francisco, USA, 30.01.2018